
MENG 472/474 Projects - Spring 2017
In MENG 472/474, students work on independent projects that cover a wide range of topics, from traditional mechanical engineering topics (e.g., mechanical device design, fluid flow, and materials analysis) to interdisciplinary topics at the interface between mechanical engineering and other branches of engineering such as biomedical, chemical, electrical, or environmental engineering. Under the supervision of faculty advisers, students investigate physical phenomena through experimental measurement and/or numerical simulation, and they design and construct functioning prototypes to solve engineering problems. The majority of the faculty advisers come from within the mechanical engineering department, with the remaining advisers distributed across the University (and occasionally outside the University). Funding for projects is generously provided by the Yale SEAS Dean's Office and, in some cases, through the faculty advisers. The students were asked to write the following short summaries two-thirds of the way through the semester, when they still had a few weeks to go on their projects. All projects are represented here, except for those that cannot be publicized due to information of a proprietary nature.
Biomechanics Research
Bilateral jumping deficit: A learned behavior
Dante Archangeli
Adviser: Prof. Madhusudhan Venkadesan, Mechanical Engineering and Materials Science
 Athletic performance is highly valued in modern society. Olympic medalists are idolized and professional athletes make millions of dollars each year. In international jumping events, mere centimeters can be the difference between victory and defeat. Yet, as athletes push themselves to break records, the likelihood of injuries increases. A better understanding of jumping can create the inches needed to win or the medical support to bring athletes back into the game. Our research explores the bilateral jumping deficit, the observation that the force and work per limb in a one-footed jump is greater than the force and work per limb in a two-footed jump. Explanations of this deficit focus on reduced neural drive and the force-velocity relationship during muscle contraction. We take a novel approach and explore psychological and other physiological factors that might affect jumping. We hypothesize that muscles inconsistently produce maximum effort. This inconsistency can cause a variation in force across the body midline, causing a jumper to erratically take off or land. To test this hypothesis, we will use an array of strain gauges to measure variation between intent and actual force production during isometric contractions. We hope our research findings will improve athletic training and recovery. Athletic performance is highly valued in modern society. Olympic medalists are idolized and professional athletes make millions of dollars each year. In international jumping events, mere centimeters can be the difference between victory and defeat. Yet, as athletes push themselves to break records, the likelihood of injuries increases. A better understanding of jumping can create the inches needed to win or the medical support to bring athletes back into the game. Our research explores the bilateral jumping deficit, the observation that the force and work per limb in a one-footed jump is greater than the force and work per limb in a two-footed jump. Explanations of this deficit focus on reduced neural drive and the force-velocity relationship during muscle contraction. We take a novel approach and explore psychological and other physiological factors that might affect jumping. We hypothesize that muscles inconsistently produce maximum effort. This inconsistency can cause a variation in force across the body midline, causing a jumper to erratically take off or land. To test this hypothesis, we will use an array of strain gauges to measure variation between intent and actual force production during isometric contractions. We hope our research findings will improve athletic training and recovery. |
Determining joint mobility based on articular surface geometry
Lucia Korpas
Adviser: Prof. Madhusudhan Venkadesan, Mechanical Engineering and Materials Science
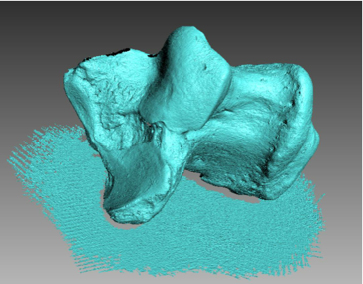 The articular surfaces and soft tissue structures of joints permit movement in specific directions while providing stability and minimizing mobility in others. The exact mechanisms which prescribe these directions are not fully understood. At the Yale Biomechanics and Control Lab, we are applying analytical, computational and experimental approaches to test theories of joint mobility, with a focus on joints of the leg and foot. This semester, this has involved developing a strategy for obtaining and analyzing 3D surface models of bones and their articular surfaces and collecting preliminary data. This work may have a range of implications in evolutionary biology and human health, such as to facilitate the extraction of information on extinct animals’ walking habits from fossils. The articular surfaces and soft tissue structures of joints permit movement in specific directions while providing stability and minimizing mobility in others. The exact mechanisms which prescribe these directions are not fully understood. At the Yale Biomechanics and Control Lab, we are applying analytical, computational and experimental approaches to test theories of joint mobility, with a focus on joints of the leg and foot. This semester, this has involved developing a strategy for obtaining and analyzing 3D surface models of bones and their articular surfaces and collecting preliminary data. This work may have a range of implications in evolutionary biology and human health, such as to facilitate the extraction of information on extinct animals’ walking habits from fossils. |
Body orientation stability during maximum-impulse two-legged jumping
Alexander Lee
Adviser: Prof. Madhusudhan Venkadesan, Mechanical Engineering and Materials Science
 Whenever the body applies a force, there is a difference between the intended and the actual forces. This is the reason why activities such as shooting a three-pointer in basketball or hitting a serve in tennis are so difficult. In the case of two-legged jumping, unintended forces can cause the jumper to rotate in the air, leading to injury upon landing. Preliminary measurements in the Yale Biomechanics and Control Lab indicate that the magnitude of the difference between intended and realized forces during a jump should cause a human jumper to fall for all but the smallest of jumps. The purpose of this project is to validate a hypothesis for why it is that humans do not fall when they jump. Whenever the body applies a force, there is a difference between the intended and the actual forces. This is the reason why activities such as shooting a three-pointer in basketball or hitting a serve in tennis are so difficult. In the case of two-legged jumping, unintended forces can cause the jumper to rotate in the air, leading to injury upon landing. Preliminary measurements in the Yale Biomechanics and Control Lab indicate that the magnitude of the difference between intended and realized forces during a jump should cause a human jumper to fall for all but the smallest of jumps. The purpose of this project is to validate a hypothesis for why it is that humans do not fall when they jump. |
Developing a novel model of human throwing
Petter Wehlin
Adviser: Prof. Madhusudhan Venkadesan, Mechanical Engineering and Materials Science
 Human throwing abilities are yet to be fully explained. Based on the accuracy and speed with which skilled individuals throw, one can show that they consistently let go of the object during a launch window of about one millisecond. This launch window is much shorter than what nerve impulses can reliably control. Hence, in the Yale Biomechanics and Control Lab, we hypothesize that some other biomechanical mechanism exists that allows humans to throw objects as accurately as we do. Our research focuses on testing this hypothesis through a physical model of a human arm, as well as through numerical simulations of the dynamics of throwing. Our results will hopefully advance our understanding of human throwing, and they may have potential applications in high-speed throwing robots. Human throwing abilities are yet to be fully explained. Based on the accuracy and speed with which skilled individuals throw, one can show that they consistently let go of the object during a launch window of about one millisecond. This launch window is much shorter than what nerve impulses can reliably control. Hence, in the Yale Biomechanics and Control Lab, we hypothesize that some other biomechanical mechanism exists that allows humans to throw objects as accurately as we do. Our research focuses on testing this hypothesis through a physical model of a human arm, as well as through numerical simulations of the dynamics of throwing. Our results will hopefully advance our understanding of human throwing, and they may have potential applications in high-speed throwing robots. |
Design
Modeling and analysis of heat rejection in thermoGreenwalls
David Amanfu and Christian White
Advisers: Prof. Alexander Felson, Schools of Architecture and Forestry and Environmental Studies, and Prof. Corey O’Hern, Mechanical Engineering and Materials Science
 thermoGreenwalls are non-infrastructural units composed of pre-vegetated panels that serve as sustainable alternatives to cooling towers and provide heat rejection and water and air quality treatment. Under the supervision of Yale’s Urban Ecology and Design Lab (UED) and based off of previous work from the UED, we are conducting the modeling and analysis of heat rejection in a thermoGreenwall to implement a physical model in a site on Yale’s campus. We started the modeling process by analyzing different functions of the thermoGreenwall including heat rejection, solar radiance, and water quality treatment. We used MATLAB SimuLink to analyze the heat transfer into and out of the wall through solar radiation, convection, conduction, and advection from adjacent panels. So far we have obtained a preliminary model addressing the one-dimensional heat transfer of a wall. Additionally, we have been developing a design for the implementation of a prototype. We coordinated meetings with the Yale Office of Sustainability who provided us with metrics on assessing an ideal test location. Subsequently, we coordinated with the Facilities Department to gather building documents and arrange tours of potential sites. These meetings have yielded preliminary sketches and designs for the building attachments and HVAC (heating, ventilation, and air conditioning) system interfaces. In the coming weeks we are preparing to integrate the models for different functions of the thermoGreenwall and to continue designing the interfaces, attachments, monitoring and maintenance systems for the physical prototype. thermoGreenwalls are non-infrastructural units composed of pre-vegetated panels that serve as sustainable alternatives to cooling towers and provide heat rejection and water and air quality treatment. Under the supervision of Yale’s Urban Ecology and Design Lab (UED) and based off of previous work from the UED, we are conducting the modeling and analysis of heat rejection in a thermoGreenwall to implement a physical model in a site on Yale’s campus. We started the modeling process by analyzing different functions of the thermoGreenwall including heat rejection, solar radiance, and water quality treatment. We used MATLAB SimuLink to analyze the heat transfer into and out of the wall through solar radiation, convection, conduction, and advection from adjacent panels. So far we have obtained a preliminary model addressing the one-dimensional heat transfer of a wall. Additionally, we have been developing a design for the implementation of a prototype. We coordinated meetings with the Yale Office of Sustainability who provided us with metrics on assessing an ideal test location. Subsequently, we coordinated with the Facilities Department to gather building documents and arrange tours of potential sites. These meetings have yielded preliminary sketches and designs for the building attachments and HVAC (heating, ventilation, and air conditioning) system interfaces. In the coming weeks we are preparing to integrate the models for different functions of the thermoGreenwall and to continue designing the interfaces, attachments, monitoring and maintenance systems for the physical prototype. |
Revision of a Formula SAE race car: BR14
Taha Ramazanoglu
Advisers: Dr. Joseph Zinter and Prof. Corey O’Hern, Mechanical Engineering and Materials Science
 The revision of the BR14 Formula SAE race car aims to preserve the engineering knowhow acquired by Bulldogs Racing through the design and manufacturing of the vehicle in 2014. BR14 remained tabled and partially disassembled during the all-electric race car project (BR16) in 2015 and 2016. Since the last team members who have seen the vehicle in working order belong to Class of 2017, one member decided that it would serve the team well to restore the vehicle back to working order and document the revised engineering subsystems. The first step was assessing which subsystems needed repairs and redesigns. The cooling, ergonomics, and electrical subsystems were determined to be in need of revisions due to a leaking radiator, malfunctioning dashboard, and a worn-out battery as well as a wiring scheme that was prone to faults. The car was also in need of painting due to rusting parts. So far we have replaced the battery, redesigned the wiring harnesses and acquired a new radiator. In the upcoming days we will have put the radiator in the car, installed the wiring, and finished painting. The revised car and the accompanying documentation will enable the team to build upon its previous experiences. The revision of the BR14 Formula SAE race car aims to preserve the engineering knowhow acquired by Bulldogs Racing through the design and manufacturing of the vehicle in 2014. BR14 remained tabled and partially disassembled during the all-electric race car project (BR16) in 2015 and 2016. Since the last team members who have seen the vehicle in working order belong to Class of 2017, one member decided that it would serve the team well to restore the vehicle back to working order and document the revised engineering subsystems. The first step was assessing which subsystems needed repairs and redesigns. The cooling, ergonomics, and electrical subsystems were determined to be in need of revisions due to a leaking radiator, malfunctioning dashboard, and a worn-out battery as well as a wiring scheme that was prone to faults. The car was also in need of painting due to rusting parts. So far we have replaced the battery, redesigned the wiring harnesses and acquired a new radiator. In the upcoming days we will have put the radiator in the car, installed the wiring, and finished painting. The revised car and the accompanying documentation will enable the team to build upon its previous experiences. |
Materials
Tuning cellular function through novel nanopatterning techniques
Saisneha Koppaka
Advisers: Prof. Jan Schroers, Mechanical Engineering and Materials Science, and Prof. Themis Kyriakides, Biomedical Engineering and Pathology
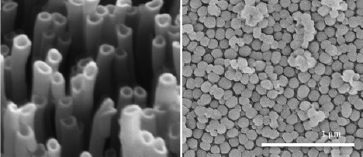 The longevity of implants can be extended by carefully orchestrating the foreign body response (FBR) through nanopatterning. Nanopatterning is a process for generating surface features, such as rods or pores, on the nanometer length scale. One biomaterial that offers excellent processing capabilities for forming these nanoscale patterns is polymers. With this project, we optimize a protocol for nanopatterning polymeric substrates via a type of compression molding process known as thermoplastic forming. By heating a material to its glass-transition temperature and then using a compressive force to press the material into nano-scale porous molds, we form the nanorods on various polymer substrates. Tuning the tip shape of the polymer nanorod, as shown in the accompanying scanning electron microscopy image (right image — convex tip shape; left image — concave tip shape), is still a work in progress. By the end of the semester, we aim to characterize the optimal processing conditions of a range of polymers to determine which temperature and pressure conditions will yield uniform arrays of nanorods of desired morphology. We hope that the successful fabrication of polymer nanorods can have applications in the field of nanofabrication and biomaterials. The longevity of implants can be extended by carefully orchestrating the foreign body response (FBR) through nanopatterning. Nanopatterning is a process for generating surface features, such as rods or pores, on the nanometer length scale. One biomaterial that offers excellent processing capabilities for forming these nanoscale patterns is polymers. With this project, we optimize a protocol for nanopatterning polymeric substrates via a type of compression molding process known as thermoplastic forming. By heating a material to its glass-transition temperature and then using a compressive force to press the material into nano-scale porous molds, we form the nanorods on various polymer substrates. Tuning the tip shape of the polymer nanorod, as shown in the accompanying scanning electron microscopy image (right image — convex tip shape; left image — concave tip shape), is still a work in progress. By the end of the semester, we aim to characterize the optimal processing conditions of a range of polymers to determine which temperature and pressure conditions will yield uniform arrays of nanorods of desired morphology. We hope that the successful fabrication of polymer nanorods can have applications in the field of nanofabrication and biomaterials. |