In MENG 471/473, students work on independent projects that cover a wide range of topics, from traditional mechanical engineering topics (e.g., mechanical device design, fluid flow, and materials analysis) to interdisciplinary topics at the interface between mechanical engineering and other branches of engineering such as biomedical, chemical, electrical, or environmental engineering. Under the supervision of faculty advisers, students investigate physical phenomena through experimental measurement and/or numerical simulation, and they design and construct functioning prototypes to solve engineering problems. The majority of the faculty advisers come from within the mechanical engineering department, with the remaining advisers distributed across the University (and occasionally outside the University). Funding for projects is generously provided by the Yale SEAS Dean's Office and, in some cases, through the faculty advisers. The students were asked to write the following short summaries two-thirds of the way through the semester, when they still had a few weeks to go on their projects. All projects are represented here, except for those that cannot be publicized due to information of a proprietary nature.
Experimental cardiac containment system circuitry
Aydin Akyol
Adviser: Prof. Stuart Campbell, Biomedical Engineering
|
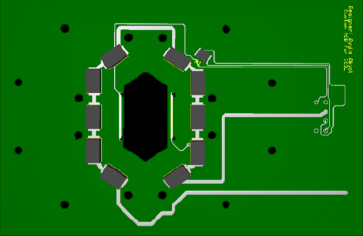 The human heart is an incredibly intricate system of living cells that must continuously operate throughout an individual's life. Like all living cells, however, cardiac cells can be diseased or adversely affected by drugs in unexpected ways. To understand and prevent both disease and adverse effects, the Yale Integrative Cardiac Biomechanics Laboratory studies the dynamics of the heart-contraction event. However, there are some challenges to studying living, beating heart tissue, namely providing the cells with well-controlled and well-measured physiological conditions. This project seeks to integrate the functionalities necessary for cardiac tissue experimentation through the use of a specialized printed circuit board (PCB) design. Using interdisciplinary computer aided engineering, we hope to develop a PCB-based system that improves the quality and functionality of current experimental procedure. However, this system is not only designed with current experimentation in mind. This PCB-based system, once completed, will enable the future development of high-throughput experimentation for cardiac tissue. Such advancements in experimentation will empower research that may one day be used to treat disease. The human heart is an incredibly intricate system of living cells that must continuously operate throughout an individual's life. Like all living cells, however, cardiac cells can be diseased or adversely affected by drugs in unexpected ways. To understand and prevent both disease and adverse effects, the Yale Integrative Cardiac Biomechanics Laboratory studies the dynamics of the heart-contraction event. However, there are some challenges to studying living, beating heart tissue, namely providing the cells with well-controlled and well-measured physiological conditions. This project seeks to integrate the functionalities necessary for cardiac tissue experimentation through the use of a specialized printed circuit board (PCB) design. Using interdisciplinary computer aided engineering, we hope to develop a PCB-based system that improves the quality and functionality of current experimental procedure. However, this system is not only designed with current experimentation in mind. This PCB-based system, once completed, will enable the future development of high-throughput experimentation for cardiac tissue. Such advancements in experimentation will empower research that may one day be used to treat disease.
|
Kinetic chair: Design and construction
Victoria Ereskina
Advisers: Dr. Timothy Newton, Architecture and Prof. Corey O’Hern, Mechanical Engineering and Materials Science
|
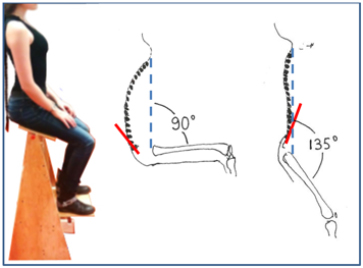 As sitting becomes more dominant in jobs and leisure, there are fewer opportunities to use and maintain muscles, bones, and connective tissue, particularly in the spine. The purpose of this project is to study how the spine can maintain its natural flexibility and curvature and use this information to develop a workstation that provides a healthier alternative to traditional chairs and standing desks. The prototype is a kinetic chair suited for a standing desk with a freely pivoting seat to engage the lower back muscles and core. Research suggests that an angle of 135° between the femur bone and the vertical is the ideal for preventing slouching, while still distributing some body load from the feet to the seat. Observing 60 random testers showed agreement with our research; the closer this angle was to 90°, the more a person tended to slouch. To maintain this angle among users of various heights, the footrest needs to have a mechanism that moves its pivot axis up and down. SolidWorks was used to study the motion and stress, and to optimize. By the end of the semester, the goal is to have a professional-looking piece of furniture that allows for a femur-spine angle of 135° ± 5°. As sitting becomes more dominant in jobs and leisure, there are fewer opportunities to use and maintain muscles, bones, and connective tissue, particularly in the spine. The purpose of this project is to study how the spine can maintain its natural flexibility and curvature and use this information to develop a workstation that provides a healthier alternative to traditional chairs and standing desks. The prototype is a kinetic chair suited for a standing desk with a freely pivoting seat to engage the lower back muscles and core. Research suggests that an angle of 135° between the femur bone and the vertical is the ideal for preventing slouching, while still distributing some body load from the feet to the seat. Observing 60 random testers showed agreement with our research; the closer this angle was to 90°, the more a person tended to slouch. To maintain this angle among users of various heights, the footrest needs to have a mechanism that moves its pivot axis up and down. SolidWorks was used to study the motion and stress, and to optimize. By the end of the semester, the goal is to have a professional-looking piece of furniture that allows for a femur-spine angle of 135° ± 5°.
|
Theatrical LED floor
Sydney Garick
Advisers: Dr. Larry Wilen and Prof. Corey O’Hern, Mechanical Engineering and Materials Science
|
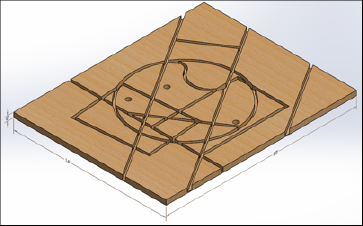 Fun Home tells the story of lesbian cartoonist Alison Bechdel as she grapples with memories of her closeted father and comes to terms with her own sexuality. In order to create the intimate atmosphere the show requires the audience will be seated in a thrust configuration, where smaller seating banks are used on three sides of the stage rather just on one side. This seating configuration presents unique challenges for designers because the use of traditional set pieces would block sight lines for the audience. To solve this problem we have designed an LED floor, which will be made of wood with patterns of painted Plexiglas laid into it. LEDs will shine through the Plexiglas to create images from below. So far we have designed the Plexiglas layout and used SolidWorks analysis to ensure the floor will be strong enough for actors to stand on. We have also determined the light distribution pattern of the LEDs in order to position the lights to maximize their brightness without showing individual pixels. For the rest of the semester we will work on building the full floor as well as the Arduino system that will control the LEDs remotely from the tech booth. Fun Home tells the story of lesbian cartoonist Alison Bechdel as she grapples with memories of her closeted father and comes to terms with her own sexuality. In order to create the intimate atmosphere the show requires the audience will be seated in a thrust configuration, where smaller seating banks are used on three sides of the stage rather just on one side. This seating configuration presents unique challenges for designers because the use of traditional set pieces would block sight lines for the audience. To solve this problem we have designed an LED floor, which will be made of wood with patterns of painted Plexiglas laid into it. LEDs will shine through the Plexiglas to create images from below. So far we have designed the Plexiglas layout and used SolidWorks analysis to ensure the floor will be strong enough for actors to stand on. We have also determined the light distribution pattern of the LEDs in order to position the lights to maximize their brightness without showing individual pixels. For the rest of the semester we will work on building the full floor as well as the Arduino system that will control the LEDs remotely from the tech booth.
|
Analysis and optimization of a Stewart platform-inspired robotic hand
Connor McCann
Adviser: Prof. Aaron Dollar, Mechanical Engineering and Materials Science
|
 In the field of robotic grasping, there have been many efforts to mimic the structure of the human hand with the aim of replicating its dexterity and reliability in a robotic system. That said, no current robotic hand has ever been able to robustly duplicate the level of performance found in humans. This can largely be attributed to the high mechanical complexity of the human hand, which can be difficult to translate into a robot. In our prior research, we explored an alternate design approach, drawing inspiration from a far simpler mechanism known as a Stewart platform. The novel hand we developed was able to perform far more dexterous motions than existing hand designs, despite having a simpler mechanical structure. In the current work, we now seek to optimize the performance of this hand, building on our initial work to model its behavior and determine ways to modify the design to achieve the highest dexterity possible. Eventually, by introducing a novel design approach for robotic hands, this work will lay the necessary groundwork to improve hand performance across multiple robotic disciplines, pushing the boundaries of robotic hand capabilities. In the field of robotic grasping, there have been many efforts to mimic the structure of the human hand with the aim of replicating its dexterity and reliability in a robotic system. That said, no current robotic hand has ever been able to robustly duplicate the level of performance found in humans. This can largely be attributed to the high mechanical complexity of the human hand, which can be difficult to translate into a robot. In our prior research, we explored an alternate design approach, drawing inspiration from a far simpler mechanism known as a Stewart platform. The novel hand we developed was able to perform far more dexterous motions than existing hand designs, despite having a simpler mechanical structure. In the current work, we now seek to optimize the performance of this hand, building on our initial work to model its behavior and determine ways to modify the design to achieve the highest dexterity possible. Eventually, by introducing a novel design approach for robotic hands, this work will lay the necessary groundwork to improve hand performance across multiple robotic disciplines, pushing the boundaries of robotic hand capabilities.
|
To move or not to move: Principal curvatures of articular surfaces
Aaron West
Adviser: Prof. Madhusudhan Venkadesan, Mechanical Engineering and Materials Science
|
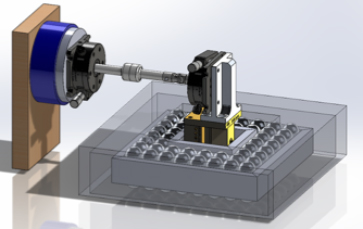 When recreating species that no longer exist, anatomists and paleontologists aim to put together bone structures and try to determine how that species may have moved. We aim to quantify their work by producing a geometric theory that can determine how a limb moves based on the surface geometry at its joint. To do so, we will design an experiment that will allow us to predict movement capabilities at a joint based purely on the principal curvatures of the articular surfaces. Our experiment will hold one end of a chicken bone connected to a load cell. On the other end, the chicken bone will have a small displacement applied to it, and based on statics, the stiffness of the joint in that particular orientation can be determined. This process will be repeated after the joint is rotated 5 degrees until we have the stiffness for all 360 degrees. So far, we have finalized a prototype for the design and determined which instruments will be used to make small, accurate rotations and displacements. By comparing our data and CT scans of surface geometry at the joint to the data of in vivo motion, a geometric theory can be produced and validated. When recreating species that no longer exist, anatomists and paleontologists aim to put together bone structures and try to determine how that species may have moved. We aim to quantify their work by producing a geometric theory that can determine how a limb moves based on the surface geometry at its joint. To do so, we will design an experiment that will allow us to predict movement capabilities at a joint based purely on the principal curvatures of the articular surfaces. Our experiment will hold one end of a chicken bone connected to a load cell. On the other end, the chicken bone will have a small displacement applied to it, and based on statics, the stiffness of the joint in that particular orientation can be determined. This process will be repeated after the joint is rotated 5 degrees until we have the stiffness for all 360 degrees. So far, we have finalized a prototype for the design and determined which instruments will be used to make small, accurate rotations and displacements. By comparing our data and CT scans of surface geometry at the joint to the data of in vivo motion, a geometric theory can be produced and validated.
|
