
Shape-Changing Robots that Adapt to Their Environments

When danger approaches, the Moroccan flic-flac spider takes the shape of a ball and rolls away to safety. Just as the trick of shape-shifting to one’s environment has proved invaluable for many creatures, Yale researchers say it could be equally useful for robots.
The laboratory of Rebecca Kramer-Bottiglio, the John J. Lee Assistant Professor of Mechanical Engineering & Materials Science, has created a robot that changes its shape and gait to adapt to different environments. The results are published in Nature Machine Intelligence.
 While roboticists have previously experimented with some very limited shape-changes in robots, the Kramer-Bottiglio team is looking toward something more extensive - for instance, a four-legged walking robot that can change to a spherical rolling robot. Kramer-Bottiglio specializes in soft robotics, which is particularly well-suited to the challenge of making shape-changing robots.
While roboticists have previously experimented with some very limited shape-changes in robots, the Kramer-Bottiglio team is looking toward something more extensive - for instance, a four-legged walking robot that can change to a spherical rolling robot. Kramer-Bottiglio specializes in soft robotics, which is particularly well-suited to the challenge of making shape-changing robots.
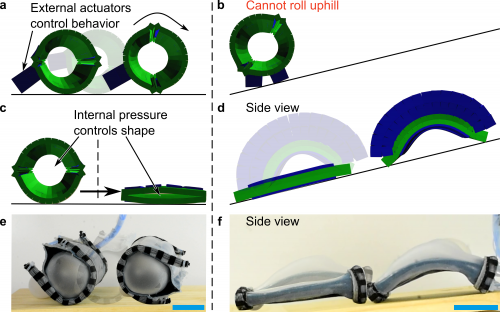
Pitting shape-changing robots against robots that were otherwise similar but maintained only one shape, the researchers found that the shape-changers had a distinct edge over their opponents in certain environments. On pretty much any kind of flat or slightly inclined terrain, they found that the robots that could deploy inner bladders to ball up and then roll to their destination did the best. But these same robots had more trouble on uphill stretches, often rolling back down. On this terrain, robots that could transition to a flat pancake-like shape and mimic an inchworm’s movements emerged victorious.
Before they built the physical robots, they used computer simulations to search for appropriate shape and behavior pairs for each environment, and then find the best ways for the robot to transform between shapes. However, it’s one thing to create an idealized robot simulation that can theoretically do various tasks, it’s another to build a physical device that can do the same things in real-world settings. After the physical robots were built, they were pitted against the computer simulations they were based on to see what’s actually possible in real-world settings.
“The final robot design was driven by a combination of what we observed in the simulations and what we knew could be achieved in reality,” said Dylan Shah, a Ph.D. student in Kramer-Bottiglio’s lab, and lead author of the study. “With the software, you can make crazy shape-changing robots with dozens of independent moving parts, but in previous studies, we had trouble making these idealized robots move in ways that matched the simulations.”
In adapting the simulations to physical robots, the researchers often simplified the designs and then explored the various ways that the robots could change shapes. One thing they found was that even relatively small changes in shape could be paired with behavior adaptations to achieve locomotion within the two environments.
The researchers are currently investigating how to leverage smart materials to increase the flexibility and dexterity of shape-changing robots, for instance by growing limbs and controlling the location of joints throughout the robot’s limbs and spine. “We envision future robots that can just as easily swim through water, crawl up the shore, and quickly roll down hills and along our city streets,” said Shah. Shape-changing robots could be used as scientific tools for studying amphibious behavior, delivery vehicles that need to traverse multiple terrains, and inspection tools for accessing difficult-to-reach locations.
Other contributors include co-lead author Joshua P. Powers, Sam Kriegman, and Josh Bongard, all of the University of Vermont; and Liana G. Tilton, formerly of Yale University and now at Washington University in St. Louis.