
MENG 472/474 Projects - Spring 2018
In MENG 472/474, students work on independent projects that cover a wide range of topics, from traditional mechanical engineering topics (e.g., mechanical device design, fluid flow, and materials analysis) to interdisciplinary topics at the interface between mechanical engineering and other branches of engineering such as biomedical, chemical, electrical, or environmental engineering. Under the supervision of faculty advisers, students investigate physical phenomena through experimental measurement and/or numerical simulation, and they design and construct functioning prototypes to solve engineering problems. The majority of the faculty advisers come from within the mechanical engineering department, with the remaining advisers distributed across the University (and occasionally outside the University). Funding for projects is generously provided by the Yale SEAS Dean's Office and, in some cases, through the faculty advisers. The students were asked to write the following short summaries two-thirds of the way through the semester, when they still had a few weeks to go on their projects. All projects are represented here, except for those that cannot be publicized due to information of a proprietary nature.
Particle contamination in microfluidics
Sierra Jackson and Richard Hicks
Advisers: Dr. Sara Hashmi, Chemical & Environmental Engineering and Prof. Corey O’Hern, Mechanical Engineering & Materials Science
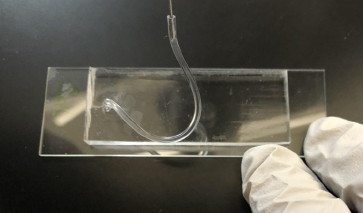
In this project, we are determining if a cheap, mechanical device in microfluidics can be designed to detect the presence and concentration of harmful particles in water, oil, and water and oil emulsions in place of expensive chemical tests currently used for detection. Currently, testing for contamination requires samples to be sent to off-site laboratories, which often have a turnaround time of over 48 hours. In the case of water safety tests, besides this process being expensive logistically, it doesn’t allow for the results of testing to be returned in time for the water to be stopped from entering the main system. The device itself is a polydimethylsiloxane mold on a glass slide that we insert the sample fluid through by way of a syringe and small tubing. Each device has approximately 200 channels, which allowing for 200 largely independent tests in a small device. We vary different particle characteristics in the solution (such as concentration and particle size) in order to determine whether these microfluidic devices will clog at predictable times with the presence of contaminants. So far we have worked on creating our own microfluidic devices as well as creating solutions for the tests with different variables. We have performed a preliminary test with the devices and seen clogs due to the particulate matter, indicating that these devices are capable of detecting particles. We hope to create a matrix that holds different probabilities for clogging times dependent on particle size, shape, and concentration. This matrix can then be applied in conjunction with a simple timer in order to determine the presence and type of particles in unknown solutions. |
Correlating heat rejection and flow rate in thermoGreenWalls
Kevin Koste and Greg Campbell
Adviser: Prof. Alexander Felson, Schools of Architecture and Forestry & Environmental Studies

Buildings conventionally use energy-intensive cooling towers to reject heat from air conditioning systems in warm climates. We are researching a potential alternative to cooling towers called thermoGreenWalls, which are green infrastructure systems that use evaporation and plant transpiration to reject this heat. In thermoGreenWalls, water flows through the roots of wetlands plants, which are embedded in a porous felt material, and the plants cool the water as it flows. In addition to environmental conditions such as solar radiation and wind speed, the amount of water flowing through the thermoGreenWall each minute also affects the overall heat rejection potential. This experiment investigated the relationship between flow rate and heat rejection for an indoor thermoGreenWall system. Our experimental setup included two 3’ x 8’ thermoGreenWall panels operating in a closed-loop system including a reservoir, pump, and heater. The water distribution system was redesigned to support a maximum flow rate of 6 gallons per minute, which was ten times greater than the historical maximum. Each panel was also fitted with instrumentation allowing researchers to modulate flow rate while measuring the conditions of the water entering and exiting each panel. These measurements will be used to calculate the overall heat rejection of each panel to determine the optimal operating conditions. To test an additional variable, one panel included plants while the other did not. The heater ensured that the water entering each panel remained at a constant temperature of approximately 35°C. The results of this study will determine the feasibility of integrating a thermoGreenWall system with the air conditioning system of a campus building. thermoGreenWalls are a promising green infrastructure concept with a high potential for reducing the energy consumption of the built environment. |
Dimensional synthesis and fabrication of a Stewart platform-inspired robotic hand
Connor McCann
Adviser: Prof. Aaron M. Dollar, Mechanical Engineering & Materials Science
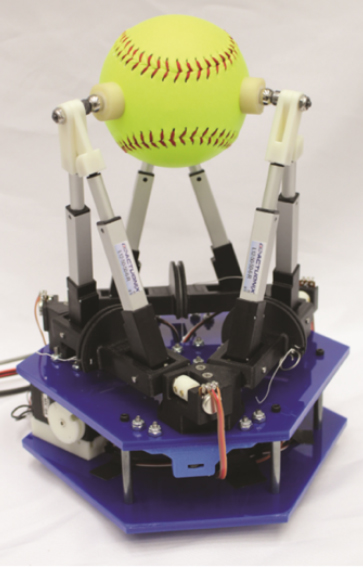
In the field of robotic grasping, researchers have attempted to mimic the structure of the human hand with the aim of replicating its dexterity and reliability in a robotic system. That said, no current robotic hand has ever been able to robustly duplicate this level of performance. This can largely be attributed to the high mechanical complexity of the human hand, which can be difficult to translate into a robot. In our prior research, we explored an alternate design approach, drawing inspiration from the far simpler “Stewart platform” mechanism. The novel hand we developed was able to perform far more dexterous motions than existing hand designs, despite having a simpler mechanical structure. In this current work, we have sought to optimize the performance of the hand, determining (in simulation) the optimal design parameter values for particular applications. We now seek to validate these results experimentally, constructing an improved prototype hand that will allow us to investigate the impact of the different design parameters on performance. Eventually, by introducing a novel design approach for robotic hands, this work will lay the groundwork to improve hand performance across multiple robotic disciplines, pushing the boundaries of robotic hand capabilities. |
To move or not to move: Principal curvatures of articular surfaces
Aaron Michael West
Adviser: Prof. Madhusudan Venkadesan, Mechanical Engineering & Materials Science
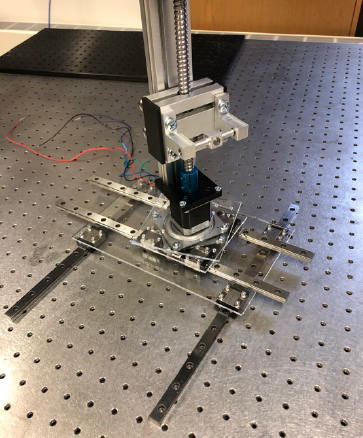
When recreating species that no longer exist, anatomists and paleontologists aim to put together bone structures and try to determine how that species may have moved. We aim to quantify their work by producing a geometric theory that can determine how a limb moves based on the surface geometry at its joint. To do so, we have designed an experiment that will allow us to predict movement capabilities at a joint based purely on the principal curvatures of the articular surfaces. Our experiment will hold one end of a chicken bone connected to a load cell. On the other end, the chicken bone will have a small displacement applied to it, and based on statics, the stiffness of the joint in that particular orientation can be determined. By comparing our data and CT scans of surface geometry at the joint to the data of in vivo motion, a geometric theory can be produced and validated. We have tested one prototype of this experiment. We are currently building the final version of this experiment. We hope to do preliminary tests prior to the end of the semester. |