
Doctoral Student Wins 2014 ASME Student Mechanism Competition
Doctoral student Joseph Belter has won first place in the graduate student mechanisms category of the American Society of Mechanical Engineers’ (ASME) 2014 Student Mechanism & Robotic Design competition for his miniaturized passively adaptive constant power linear actuator. The invention enables small, lightweight motors to achieve higher overall power output, which could be used to improve the power-to-weight ratio of robotic actuators.

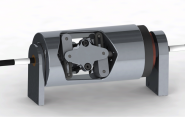
Belter’s winning invention is an actuator that converts rotary motion to linear motion using an electric motor. A coupled transmission automatically changes the gear ratio as a function of the output load, thereby overcoming the narrow peak efficiency that often limits actuator performance.
Belter is a student in the lab of Aaron Dollar, the John J. Lee Associate Professor of Mechanical Engineering & Materials Science, where his research focuses on improvements to prosthetic hands and wrists. In fact, the actuator could have significant applications in the fields of mobile robotics and motorized prosthetics, where different power ratios are needed for, say, when a prosthetic knee or wrist must meet both the needs of supporting heavy loads and moving extremely fast.
In addition to presenting his invention to a forum of judges and engineers at ASME’s 2014 International Design & Engineering Technical Conference, Belter has already filed a provision patent on the design, and a scientific article on the invention has been accepted to Transactions on Robotics.