
MENG 471/473 Projects - Fall 2016
In MENG 471/473, students work on independent projects that cover a wide range of topics, from traditional mechanical engineering topics (e.g., mechanical device design, fluid flow, and materials analysis) to interdisciplinary topics at the interface between mechanical engineering and other branches of engineering such as biomedical, chemical, electrical, or environmental engineering. Under the supervision of faculty advisers, students investigate physical phenomena through experimental measurement and/or numerical simulation, and they design and construct functioning prototypes to solve engineering problems. The majority of the faculty advisers come from within the mechanical engineering department, with the remaining advisers distributed across the University (and occasionally outside the University). Funding for projects is generously provided by the Yale SEAS Dean's Office and, in some cases, through the faculty advisers. The students were asked to write the following short summaries two-thirds of the way through the semester, when they still had a few weeks to go on their projects.
Biomechanics Research
Developing a model of human throwing
Petter Wehlin
Adviser: Prof. Madhusudhan Venkadesan, Mechanical Engineering and Materials Science
 Human throwing abilities are yet to be fully explained. Based on the accuracy and speed with which skilled individuals throw, one can show that they consistently let go of the object during a launch window of about one millisecond. This launch window is much shorter than what nerve impulses can reliably control. Hence, in the Yale Biomechanics and Control Lab, we hypothesize that some other biomechanical mechanism exists that allows humans to throw objects as accurately as we do. Our research focuses around testing this hypothesis through a physical model of a human arm, as well as through theoretical means. Our results could advance our understanding of human throwing, and have potential applications in high-speed throwing robots. Human throwing abilities are yet to be fully explained. Based on the accuracy and speed with which skilled individuals throw, one can show that they consistently let go of the object during a launch window of about one millisecond. This launch window is much shorter than what nerve impulses can reliably control. Hence, in the Yale Biomechanics and Control Lab, we hypothesize that some other biomechanical mechanism exists that allows humans to throw objects as accurately as we do. Our research focuses around testing this hypothesis through a physical model of a human arm, as well as through theoretical means. Our results could advance our understanding of human throwing, and have potential applications in high-speed throwing robots. |
Body orientation stability during maximum-impulse two-legged jumping
Alexander Lee
Adviser: Prof. Madhusudhan Venkadesan, Mechanical Engineering and Materials Science
 Whenever the body applies a force, there is a difference between the intended and the actual forces. In the case of two-legged jumping, these unintended forces can cause the jumper to rotate in the air, leading to injury upon landing. Preliminary measurements in the Yale Biomechanics and Control Lab indicate that the magnitude of the difference between intended and realized forces during a jump should cause a human jumper to fall for all but the smallest of jumps. The purpose of this project is to test a hypothesis that the mechanics of the pelvis balances the impulse applied by the legs. Our approach for evaluating this hypothesis uses mechanical jumpers and high speed motion capture measurements to assess the role of the pelvis. The accompanying image is a motion capture of the mechanical jumper. The jumper consists of a body (top square), two legs (bottom two squares), and a pelvis (middle triangle). The image is a reconstruction of markers on the jumper, which are tracked at 1000 fps using multiple cameras. Whenever the body applies a force, there is a difference between the intended and the actual forces. In the case of two-legged jumping, these unintended forces can cause the jumper to rotate in the air, leading to injury upon landing. Preliminary measurements in the Yale Biomechanics and Control Lab indicate that the magnitude of the difference between intended and realized forces during a jump should cause a human jumper to fall for all but the smallest of jumps. The purpose of this project is to test a hypothesis that the mechanics of the pelvis balances the impulse applied by the legs. Our approach for evaluating this hypothesis uses mechanical jumpers and high speed motion capture measurements to assess the role of the pelvis. The accompanying image is a motion capture of the mechanical jumper. The jumper consists of a body (top square), two legs (bottom two squares), and a pelvis (middle triangle). The image is a reconstruction of markers on the jumper, which are tracked at 1000 fps using multiple cameras. |
Materials
Nanopatterning polymers with thermoplastic forming
Saisneha Koppaka
Adviser: Prof. Jan Schroers, Mechanical Engineering and Materials Science
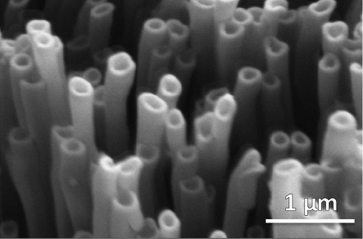 The longevity of medical implants can be extended by carefully orchestrating the foreign body response (FBR) through nanopatterning. Nanopatterning is a process for generating surface features, such as rods or pores, on the nanometer length scale. One biomaterial that offers excellent processing capabilities for forming these nanoscale patterns is polymers. With this project, we optimize a protocol for nanopatterning polymeric substrates via a type of compression molding process known as thermoplastic forming. By heating a material to its glass-transition temperature and then using a compressive force to press the material into nano-scale porous molds, we form the nanorods on polymer substrates. Tuning the shape of the polymer nanorod, as shown in the accompanying scanning electron microscopy image, is still a work in progress. By the end of the semester, we aim to characterize the optimal processing conditions of a range of polymers to determine which temperature and pressure conditions yield a uniform arrays rods of desired morphology. We hope that the successful fabrication of polymer nanorods can have important applications in the field of nanofabrication and biomedical engineering. The longevity of medical implants can be extended by carefully orchestrating the foreign body response (FBR) through nanopatterning. Nanopatterning is a process for generating surface features, such as rods or pores, on the nanometer length scale. One biomaterial that offers excellent processing capabilities for forming these nanoscale patterns is polymers. With this project, we optimize a protocol for nanopatterning polymeric substrates via a type of compression molding process known as thermoplastic forming. By heating a material to its glass-transition temperature and then using a compressive force to press the material into nano-scale porous molds, we form the nanorods on polymer substrates. Tuning the shape of the polymer nanorod, as shown in the accompanying scanning electron microscopy image, is still a work in progress. By the end of the semester, we aim to characterize the optimal processing conditions of a range of polymers to determine which temperature and pressure conditions yield a uniform arrays rods of desired morphology. We hope that the successful fabrication of polymer nanorods can have important applications in the field of nanofabrication and biomedical engineering. |